
Реализация 2D физики в JavaScript
Физика и реализация реально зрелищных анимаций может показаться очень сложной затеей, но на самом деле это не так. Эти алгоритмы могут быть очень простыми и могут производить реалистичное моделирование различных физических понятий, включая скорость, ускорение или гравитацию.
Итак, давайте посмотрим, как работают эти алгоритмы при реализации двумерного физического моделирования в JavaScript!
Равномерное и ускоренное движение
Давайте начнем с самого простого — перемещать объекты вокруг.
Если мы хотим просто равномерное движение, то мы можем использовать такой код:
function move(dt) {
x += vx * dt;
y += vy * dt;
}В приведенном выше коде x и y — координаты объекта, например, эллипс, next vx и vy — скорости по горизонтальной и вертикальной оси соответственно, а dt (дельта времени) — это время между 2 тактами таймера, что в случае JavaScript есть 2 вызова на requestAnimationFrame.
Как пример — если бы мы хотели переместить объект, сидящий в (150, 50) и двигаясь на юго-запад, то у нас было бы следующее (движение после одиночного тика):
x = 150 += -1 * 0.1 -> 149.9
y = 50 += 1 * 0.1 -> 50.1Равномерное движение довольно скучно, поэтому давайте ускорим движение наших объектов:
function move(dt) {
vx += ax * dt;
vy += ay * dt;
x += vx * dt;
y += vy * dt;
}В этом фрагменте кода мы добавили ax и ay, которые представляют ускорение по осям x и y соответственно. Мы используем ускорение для вычисления изменения скорости или скорости (vx / vy), которое мы затем используем для перемещения объектов, как раньше. Теперь, если мы скопируем предыдущий пример и добавим ускорение только по оси X (на запад), мы получим:
vx = -1 += -1 * 0.1 -> -1.1 // vx += ax * dt;
vy = 1 += 0 * 0.1 -> 1 // vy += ay * dt;
x = 150 += -1.1 * 0.1 -> 149.89 // x += vx * dt;
y = 50 += 1 * 0.1 -> 50.1 // y += vy * dt;Сила тяжести
Теперь, когда мы можем перемещать объекты, как насчет перемещения объектов к другим объектам? Ну, это просто называется гравитацией. Что нам нужно добавить, чтобы реализовать это?
Перво-наперво, давайте вспомним несколько уравнений из средней школы, а именно уравнение силы:
F = m * a
a = F / mЕсли мы теперь хотим расширить это на силу двух объектов, действующих друг на друга, мы получим:
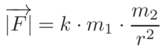
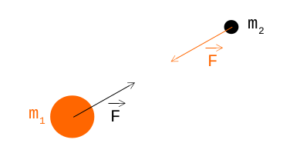
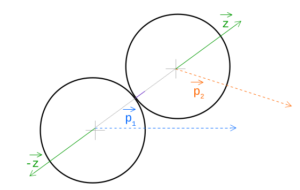
Это становится немного сложным (по крайней мере для меня), поэтому давайте разберемся с этим. В этом уравнении | F | величина силы, которая одинакова для обоих объектов, только в противоположном направлении. Эти объекты представлены их массой — m_1 и m_2. k здесь — гравитационная постоянная, а r — расстояние центров тяжести этих объектов. Если это все еще не имеет особого смысла, то вот картинка:
Если мы хотим создать некоторую визуализацию, мы получим более двух объектов, верно? Итак, что происходит, когда у нас больше объектов, действующих друг на друга?
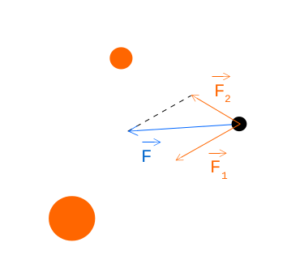
Глядя на картинку выше, мы можем видеть 2 оранжевых объекта, тянущих черный с силами F_1 и F_2, хотя нас интересует конечная сила F, которую мы можем вычислить так:
- Сначала мы рассчитываем силы F_1 и F_2, используя уравнения сверху
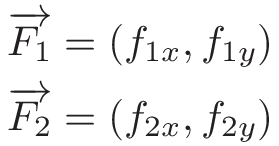
- Затем мы разбиваем его на векторы:

Хорошо, у нас есть все, что нам нужно, теперь, как будет выглядеть код? Я избавлю вас от всех шагов и просто покажу вам окончательный код с комментариями ?
function moveWithGravity(dt, o) { // «o» относится к массиву объектов, которые мы перемещаем
for (let o1 of o) { // Нулевой аккумулятор сил для каждого объекта
o1.fx = 0;
o1.fy = 0;
}
for (let [i, o1] of o.entries()) { // Для каждой пары объектов
for (let [j, o2] of o.entries()) {
if (i < j) { // To not do same pair twice
let dx = o2.x - o1.x; // Вычислить расстояние между центрами объектов
let dy = o2.y - o1.y;
let r = Math.sqrt(Math.pow(dx, 2) + Math.pow(dy, 2));
if (r < 1) { // Чтобы избежать деления на 0
r = 1;
}
// Вычислить силу для этой пары; к = 1000
let f = (1000 * o1.m * o2.m) / Math.pow(r, 2);
let fx = f * dx / r; // Разбейте его на составляющие
let fy = f * dy / r;
o1.fx += fx; // Накопить за первый объект
o1.fy += fy;
o2.fx -= fx; // И для второго объекта в противоположном направлении
o2.fy -= fy;
}
}
}
for (let o1 of o) { // для каждого обновления объекта ...
let ax = o1.fx / o1.m; //
let ay = o1.fy / o1.m;
o1.vx += ax * dt; // ...скорость
o1.vy += ay * dt;
o1.x += o1.vx * dt; // ...позиция
o1.y += o1.vy * dt;
}
}Столкновения
Когда объекты движутся, они также сталкиваются в некоторый момент. У нас есть два варианта разрешения коллизий — выталкивать объекты из коллизии или отскакивать, давайте сначала посмотрим на решение для толкания:
Прежде чем мы сможем разрешить конфликт, нам нужно сначала проверить, действительно ли сталкиваются 2 объекта:
class Collision {
constructor(o1, o2, dx, dy, d) {
this.o1 = o1;
this.o2 = o2;
this.dx = dx;
this.dy = dy;
this.d = d;
}
}
function checkCollision(o1, o2) {
let dx = o2.x - o1.x;
let dy = o2.y - o1.y;
let d = Math.sqrt(Math.pow(dx, 2) + Math.pow(dy, 2));
if (d < o1.r + o2.r) {
return {
collisionInfo: new Collision(o1, o2, dx, dy, d),
collided: true
}
}
return {
collisionInfo: null,
collided: false
}
}Сначала мы объявляем класс Collision, который представляет 2 сталкивающихся объекта. В функции checkCollision мы сначала вычисляем x и y компоненты расстояний объектов, а затем вычисляем их фактическое расстояние d. Если сумма их радиусов меньше, чем их расстояние d, то они должны быть в столкновении, поэтому мы возвращаем новый объект Collision.
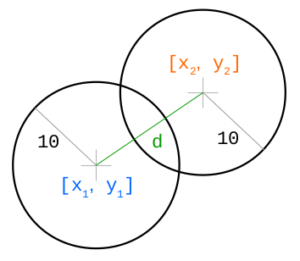
Теперь, чтобы разрешить их столкновение, нам нужно знать направление смещения и его величину:
n_x = d_x / d
n_y = d_y / d
s = r_1 + r_2 - d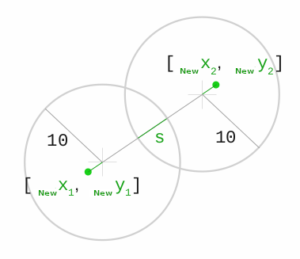
Итак, в коде JavaScript это будет:
function resolveCollision(info) { // «информация» является объектом столкновения сверху
let nx = info.dx /info.d; // Вычислить собственные векторы
let ny = info.dy /info.d;
let s = info.o1.r + info.o2.r - info.d; // Вычислить глубину проникновения
info.o1.x -= nx * s/2; // Переместить первый объект на половину размера столкновения
info.o1.y -= ny * s/2;
info.o2.x += nx * s/2; // Переместить другой объект на половину размера столкновения в противоположном направлении.
info.o2.y += ny * s/2;
}Столкновения при помощи силы
И последний кусок головоломки — разрешение столкновений путем подпрыгивания объектов. В этом случае лучше не использовать всю математику, так как это сделает статью вдвое длиннее, поэтому все, что я хочу вам сказать, это то, что нам нужно учитывать закон сохранения импульса и закон сохранения энергии, который помогает нам построить и решить следующее магическое уравнение:
k = -2 * ((o2.vx - o1.vx) * nx + (o2.vy - o1.vy) * ny) / (1/o1.m + 1/o2.m)Как этот магический k помогает нам? Мы знаем направление, в котором будут двигаться объекты (мы можем вычислить это, используя собственные векторы, как раньше, с n_x и n_y), но мы не знаем, насколько это и есть k. Итак, вот как мы вычисляем вектор (z), который говорит нам, куда перемещать эти объекты:

А теперь окончательный код:
function resolveCollisionWithBounce(info) {
let nx = info.dx /info.d;
let ny = info.dy /info.d;
let s = info.o1.r + info.o2.r - info.d;
info.o1.x -= nx * s/2;
info.o1.y -= ny * s/2;
info.o2.x += nx * s/2;
info.o2.y += ny * s/2;
let k = -2 * ((info.o2.vx - info.o1.vx) * nx + (info.o2.vy - info.o1.vy) * ny) / (1/info.o1.m + 1/info.o2.m);
info.o1.vx -= k * nx / info.o1.m;
info.o1.vy -= k * ny / info.o1.m;
info.o2.vx += k * nx / info.o2.m;
info.o2.vy += k * ny / info.o2.m;
}Вывод
В этом посте много математики, но большая часть довольно проста, поэтому я надеюсь, что это помогло вам понять и ознакомиться с этими физическими понятиями.
Один комментарий к “Реализация 2D физики в JavaScript”
Годнота, спасибо) Хоть я с матаном особо не дружу, но мне понравилось)